
par Philippe Cosentino
La tomographie sismique permet, à partir des écarts de vitesse de propagation des ondes sismiques, de mettre en évidence la présence d’anomalies thermiques dans le manteau.
Depuis mars 2024, Tectoglob3D propose un nouveau modèle de tomographie qui donne des résultats exploitables aussi bien dans des contextes de convergence et de divergence.
Cet article fait le point sur ces modèles, et leur intégration dans Tectoglob3D.
Qu’est-ce qu’un modèle de tomographie ?
Il est bien entendu impossible de mesurer directement la vitesse des ondes sismiques à 1000 km de profondeur. De même, il n’est pas non plus évident de calculer cette vitesse à partir des différences temps d’arrivées des ondes sismiques enregistrés sur les sismogrammes, car pour cela il faudrait connaître précisément leur trajet.
Ainsi il est important de rappeler dès le départ que toutes les anomalies de vitesse dont nous parlons dans cet article ont un caractère hypothétique, et ne relèvent pas de faits d’observation.
Un modèle de tomographie global est une représentation numérique des anomalies de vitesse de propagation des ondes sismiques (P ou S selon le modèle) pour une latitude, une longitude et une profondeur donnée.
Si l’on prend par exemple le modèle TX2019_slabP, ces données sont livrées dans 22 fichiers textes (chaque fichier correspondant à une tranche de profondeur) dont le contenu se présente ainsi :
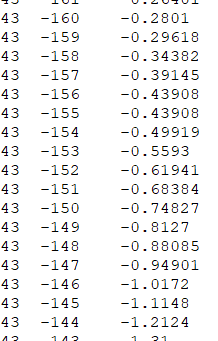
Extrait du modèle TX2019_slabP, pour la première tranche de profondeur.
La première colonne correspond à la latitude, la deuxième à la longitude, et la troisième à l’anomalie de vitesse en %.
Ces anomalies sont exprimées en pourcentage, et correspondent en fait à l’écart relatif de la vitesse des ondes par rapport à un modèle global de vitesse de référence, comme par exemple le modèle PREM. Notons que dans le cas de TX2019_slabP, le modèle de référence n’est pas PREM mais AK135, ce qui ne change pas grand chose dans le principe.
La tomographie sismique repose ainsi sur des anomalies de vitesses (dont on ne peut que supposer la valeur) de propagation des ondes sismiques par rapport à un modèle de référence (lui même très hypothétique) qui peut être PREM, ou un autre modèle (comme AK135). Notez qu’on parle bien de données hypothétiques comparées à un modèle théorique. La prudence et le recul (esprit critique) sont donc de mise face à ce que l’on obtient à l’écran, on ne le répètera jamais assez.
Pourquoi plusieurs modèles ?
Chaque modèle de tomographie sismique repose sur des jeux de données différents, mais également sur des hypothèses et des algorithmes différents. Certains utilisent par exemple les anomalies de vitesse des ondes P (comme GAP-P4), d’autres des ondes S (comme S362), sans parler de toutes les subtilités qu’il n’est pas question d’aborder ici.
De plus, chaque modèle a une résolution spatiale différente ; S362 a une très mauvaise résolution spatiale (2° d’angle) alors que GAP-P4 a une très bonne résolution (0,6°).
Enfin, comme dit précédemment, chaque modèle de tomographie détermine l’anomalie en comparant la vitesse à un modèle de référence, qui peut être PREM, AK135 ou encore STW105.
Au final chaque modèle donnera, pour une même coupe, des résultats bien différents, et s’avèrera plus pertinent dans un contexte géodynamique donné.
Jusqu’à mars 2024, Tectoglob3D ne proposait que 2 modèles de tomographie, GAP-P4 et S362-ANI.
GAP-P4 s’est montré très performant pour mettre en évidence les slabs de subduction, mais ne montrait aucune anomalie thermique sur les contextes de divergence (dorsales par exemple).
A l’inverse, S362-ANI était performant pour montrer les anomalies thermiques positives au niveau des dorsales, mais ne donnait rien de cohérent au niveau des zones de subduction.
En effet il faut savoir que les ondes de cisaillement (S) ont une capacité limitée à représenter les structures à courte longueur d’onde, telles que les plaques en subduction (voir publication scientifique en fin d’article).
Ces différences sont résumées dans le graphique ci-dessous, qui compare les résultats obtenus avec les 2 modèles, dans le cas d’une subduction (en haut) et d’une dorsale (en bas).
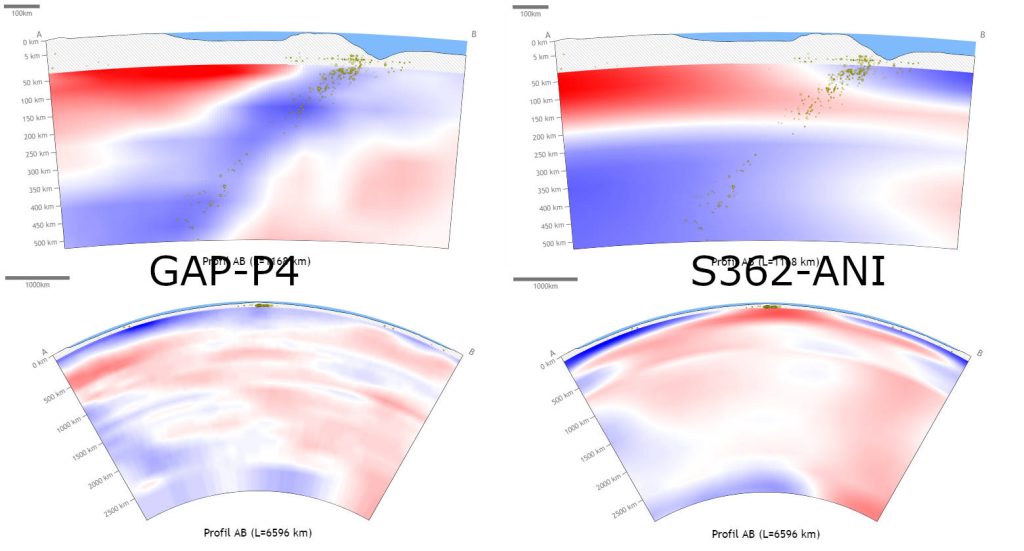
Coupe tomographique au niveau d’une zone de subduction (en haut) et d’une dorsale (en bas), avec 2 modèles différents.
En fonction de ce qu’il souhaitait étudier, l’élève devait donc choisir le modèle adapté ce qui nécessitait de savoir à l’avance ce que l’on souhaitait mettre en évidence (zone de subduction ou dorsale).
C’est pour cela que j’ai rajouté une « aide » au choix du modèle (dans le menu « Données / Tomographie ») qui guide l’élève en fonction de ce qu’il souhaite étudier.
Mais c’est aussi la raison qui m’a poussé à rajouter un modèle plus « polyvalent » dans Tectoglob3D.
Le modèle TX2019slab (nouveauté)
Je suis donc parti en quête d’un modèle qui fonctionne dans différents contextes.
Je me suis aidé pour cela d’un outil (Submachine) fourni par l’université d’Oxford (voir lien à la fin de l’article) qui permet de comparer, sur une même coupe, un très grand nombre de modèles.
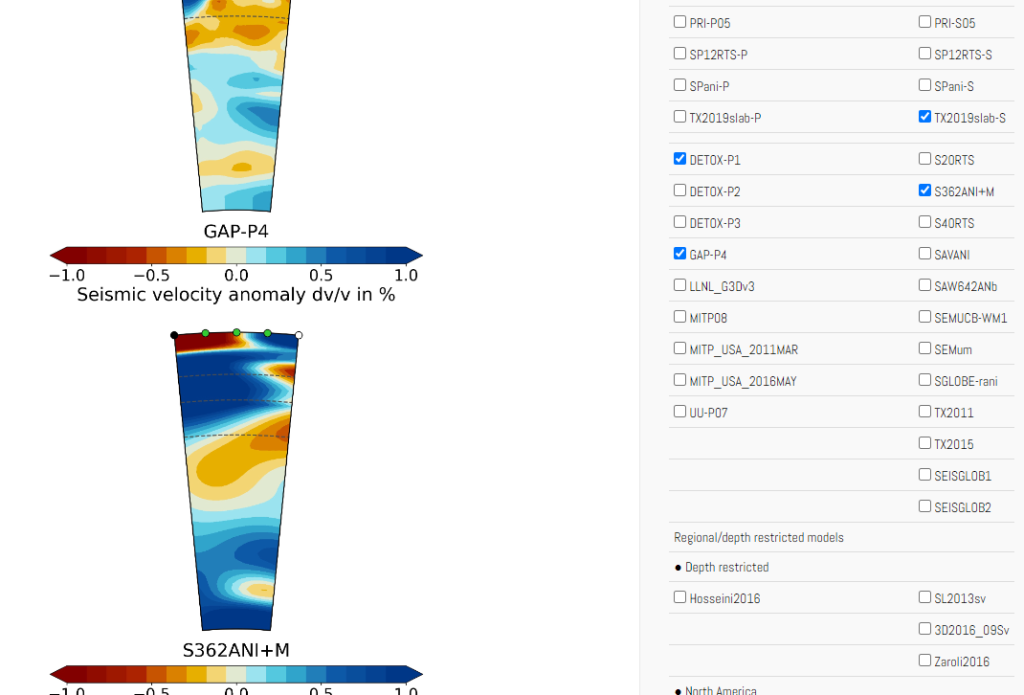
Aperçu de l’outil Submachine, et des modèles disponibles (à droite).
Un autre critère à prendre en compte est la disponibilité des données. En effet, pour qu’un modèle soit intégrable dans Tectoglob3D, il faut que les données du modèle soient disponibles (téléchargeables) et librement utilisables. Ce qui n’est hélas pas le cas de tous les modèles.
Au terme de ce travail de comparaison, il est ressorti que le candidat le plus adapté était TX2019slab (Lu et al. (2019) doi:10.1029/2019JB01744).
En effet, ce modèle donne d’excellents résultats que ce soit pour les zones de subduction (malgré sa plus faible résolution, 1°, que GAP-P4, les images obtenues sont plus « contrastées ») ou pour les dorsales.
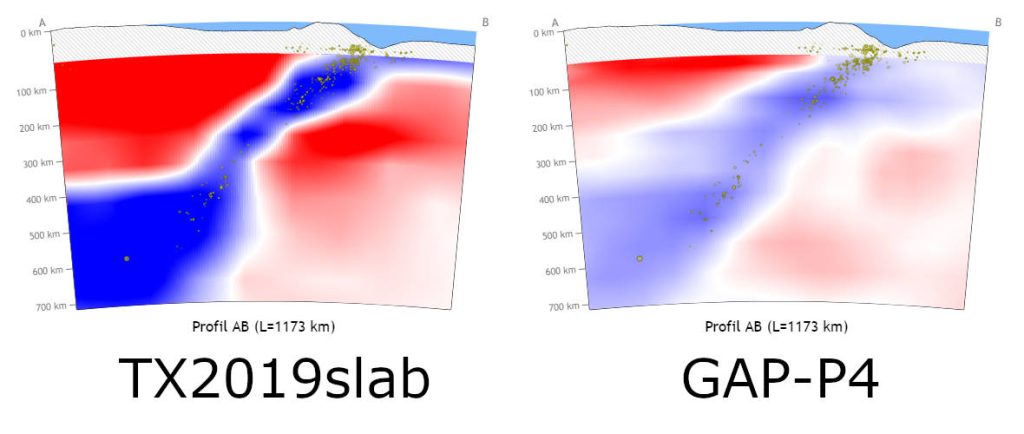
TX2019 donne des résultats plus « contrastés » que GAP-P4 au niveau des zones de subduction.
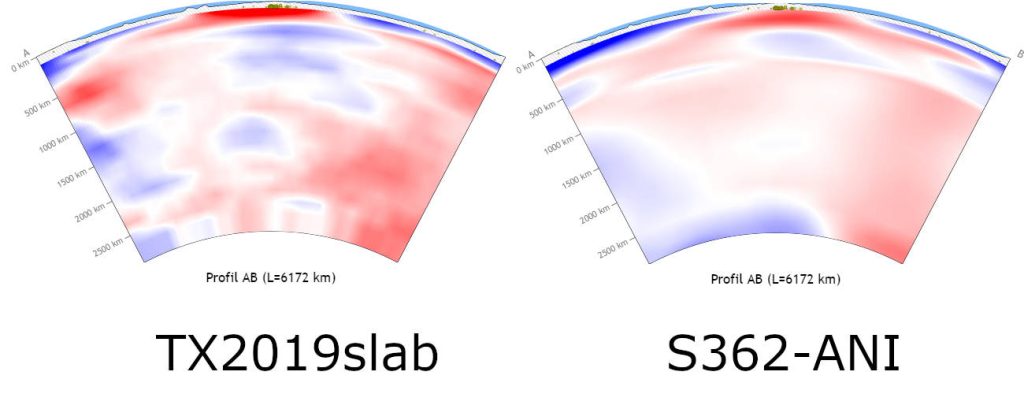
Au niveau des dorsales, TX2019 donne également des résultats cohérents avec ceux qu’on obtenait avec S362.
L’originalité de ce modèle, qui utilise conjointement les ondes P et S, est de prendre en compte « a priori » l’existence des plaques subduites (sous la forme de modèles 3D associées à leurs anomalies thermiques théoriques) afin de corriger les erreurs induites par celles-ci lors de la localisation des foyers et des trajets des ondes (« we include a priori 3‐D subducting slabs in our starting model and inverted for velocity and source parameters simultaneously. »).
Pour en savoir plus, je vous invite à lire la publication dont le lien est donné en fin d’article.
L’outil d’aide au choix du modèle
Afin d’orienter l’élève dans le choix du modèle le plus adapté à son étude, un « outil » a été ajouté dans le menu « Tomographie ».
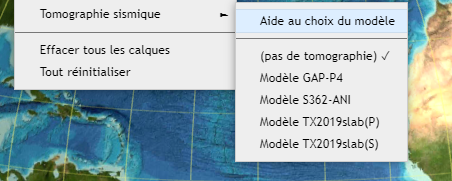
Emplacement de l’outil d’aide dans les menus.
Cet outil s’ouvre dans la fenêtre de résultats et commence par présenter le principe général de la tomographie sismique.
Vient ensuite une explication concernant la nature des modèles de tomographie sismique et leur diversité.
Un tableau est alors proposé : dans la première colonne sont proposés 3 scénarios d’étude : objectif indéterminé, subduction, et dorsales-rifts-points chauds.
La 2ème colonne contient le ou les modèles adaptés au scénario!,
La 3ème colonne contient le modèle de vitesse de référence utilisé par le modèle.
La 4ème colonne contient des commentaires éclairant l’intérêt de ces modèles.
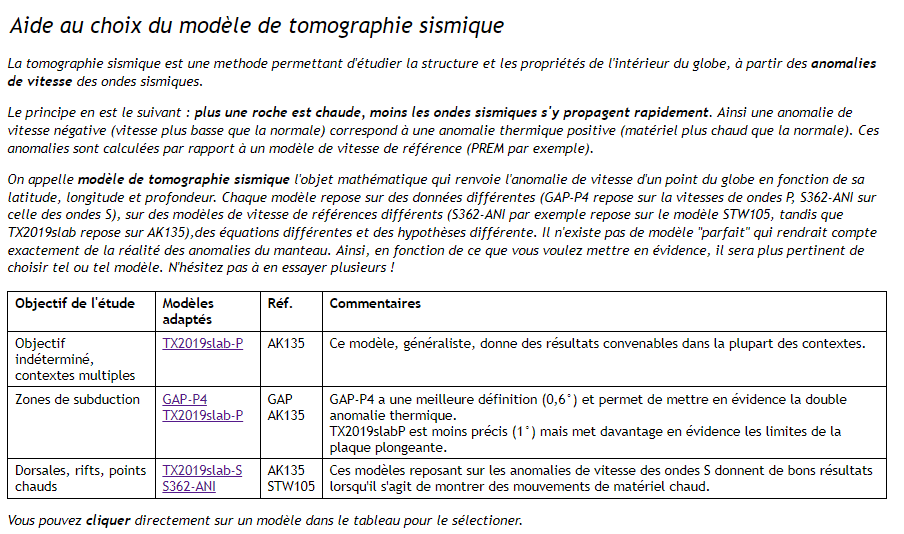
Pour choisir le modèle, l’élève n’a alors plus qu’à cliquer sur le nom de ce dernier.
Bonus : tomographies à l’échelle globale
Dans cette nouvelle version de Tectoglob3D a également été rajouté la possibilité de tracer des coupes « à l’échelle du globe », en cochant (une fois la coupe tracée) « Prolonger la coupe à l’intégralité du globe ».
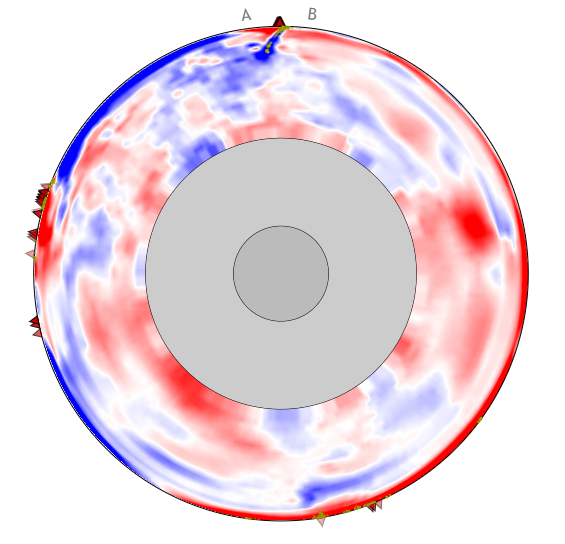
Exemple de coupe obtenue en prolongeant à l’intégralité du globe.
Conclusion
L’ajout d’un modèle polyvalent à Tectoglob3D facilitera la tâche de ceux qui veulent explorer le globe via la tomographie sismique, sans savoir a priori dans quel contexte, ou sans à avoir à changer sans arrêt de modèle suivant la zone du globe.
L’ajout d’un outil d’aide au choix quant à lui, donne du sens au choix du modèle adapté mais aussi à la nature de ce dernier. Les informations apportées sur la diversité des références et sur les limites de ces modèles permettra aussi à l’élève d’adopter une posture plus critique face à ces modèles (du moins on peut l’espérer).
Enfin, la possibilité de tracer des coupes tomographiques à l’échelle du globe permet à l’élève de prendre conscience de l’échelle relative des phénomènes étudiés.
On regrettera cependant que, pour l’instant, aucun des modèles de tomographie sismique proposés dans Tectoglob3D ne repose sur le modèle PREM. Ce sera, je l’espère, le cas dans une prochaine mise à jour (dès lors que je trouve un modèle reposant sur PREM qui soit intégrable).
Liens
Lien vers l’application Tectoglob3D
